通过超声波,海豚和*鲸即使在昏暗和漆黑的水域中也可以借助自身的回音定位功能来辨别自己的位置。潜艇也使用超声波技术来定位。超声波传感器可以计算距离,甚至可以计算距离透明材料的距离,即使在水下也不成问题。BionicFinWave的设计利用了这些属性:得益于超声波传感器,费斯托的水下机器人可在由丙烯酸玻璃制成的管道系统中实现无碰撞游动。
超声波传感器向其目标物体的方向传播高频范围内的声波,声波再从目标物体处往回反射。传感器接收这些信号后,可通过计算回声传回的时间计算出距离。通过这种测量原理,可以测量距离并确定自己的位置。
费斯托公司的水下机器人BionicFinWave采用了该技术,借助其鳍片的起伏运动,能够在透明管道系统中实现无碰撞游动。其头顶的五个超声波传感器和惯性传感器可持续测量到墙壁的距离及其当前在水中的方向。当到达管道系统转弯处时,处理器会评估这些数据并由此计算出结果,同时控制鳍片,使BionicFinWave尽可能居中游动,而不会撞击到墙壁。
起伏的鳍片运动
BionicFinWave使用两个侧鳍游动。由此产生了一个连续波浪,即所谓的起伏鳍片运动。野生的海涡虫、乌贼和裸臀鱼都以这种方式在海中移动。随着鳍片的起伏运动,鱼将水推向身后,由此产生向前的推力。
BionicFinWaves的鳍片*由硅胶制成,没有支柱或其他支撑元件。因此,其柔韧度*,可以真实地再现自然样板的流畅波浪运动。它们分别在左右两侧固定在九个小型杠杆臂上,其偏转角度为45°。杠杆臂由位于水下机器人机体上的两个伺服电机驱动。两个相邻的曲轴将动力传递至杠杆,使两个鳍片能够单独移动。这使他们能够产生不同的波形。
比如,要进行游动转弯,外部鳍片的移动速度要快于内部鳍片,与挖掘机的链条同理。BionicFinWave头部的第三个伺服电机控制机体的弯曲,使其能够上下浮动。曲轴和接头在3D打印过程中制成一体,因此具有相应的柔性和灵活性。
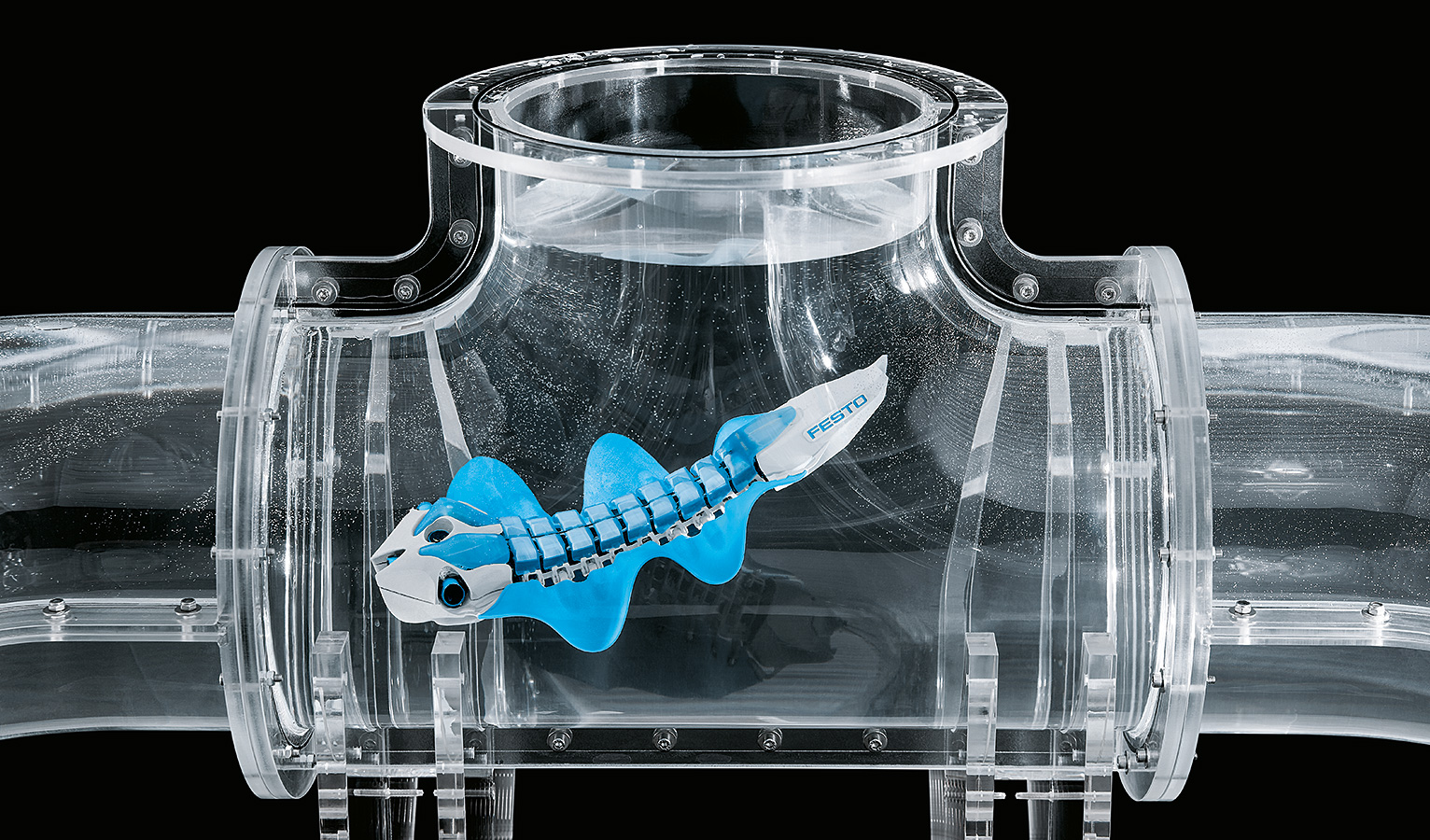 得益于超声波传感器,费斯托的BionicFinWave可在管道系统中实现无碰撞游动。
得益于超声波传感器,费斯托的BionicFinWave可在管道系统中实现无碰撞游动。


